


|
鷹 眼 II 代表了從1.7x1.7 米到 3.5x3.5米通過一個密度排列傳送海洋深測術的激光雷達數據。. 該系統是唯一實現少于25厘米rms的IHO 1b 命令。系統測量深度范圍從0.3到其大概3倍的深度。海底地勢數據捕獲來自密度范圍從4到1點每平方米的數據,作為特色的是一個比15厘米rms根更高的 精確性。
|
 |
鷹眼 II 代表了從1.7x1.7 米到 3.5x3.5米通過一個密度排列傳送海洋深測術的激光雷達數據。. 該系統是唯一實現少于25厘米rms的IHO 1b 命令。系統測量深度范圍從0.3到其大概3倍的深度。海底地勢數據捕獲來自密度范圍從4到1點每平方米的數據,作為
特色的是一個比15厘米rms根更高的精確性。
同時陸地與海洋測量
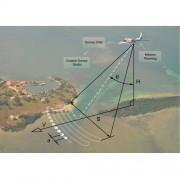
鷹眼同時收集4000個海洋測量(全波形)以及64000個地形測量(相當于每擊四個來回),它使系統最有效的機載水深雷達監測系統在世界市場極有價值。 此外,鷹眼利用兩個激光,一個綠色的還有一個紅色的,假如兩個分開回波 (當綠色的滲透表面,非激光是來自水面主要的反射)。使用這個信息,很容易區分測量數據中的不同形態。
操作者實用性
飛行任務期間,鷹眼系統通過一個同樣使用于任務計劃的筆記本電腦來操作。測量期間,一個副級的監視器指導著飛行員。信號被實時處理以及存儲到一個可移動硬盤中。因此當 那一天結束,系統將通過交換驅動器與任務計劃簡單地來為下一次任務做好準備。

終產物舉例
· X,Y,Z 點云, 包括地勢學和測深法.
· 數字高地模型
· 海洋圖表 (X,Y,深度)包括潮汐校正和清潔,取決于IHO 標準
· 正交模式嵌入圖像
· 海岸線矢量
· 海底反射率與海底分類

技術規格
|
功能 |
性能 |
注解 |
|
每秒水深探測 |
常規4000 |
同步水文和地形水深 |
|
每秒地形探測 |
常規 64 000 |
同步水文和地形水深 |
|
數碼相機 |
1600 x 1200 像素,每秒一張圖片 |
可選擇: 16萬像素相機 |
|
高度 |
常規 250 到500 米 |
最佳范圍 |
|
條帶的寬度 |
常規 100 到330 米 |
最佳范圍 |
|
飛行偏差補充 |
搖擺± 5 度 |
掃描鏡控制的2個軸伺服產生補償 |
|
位置定位系統 |
Applanix 410 |
可選擇: 可根據要求選擇其他的POS導航系統. |
|
掃描模式 |
均勻地分布在調查區(除大片限制) |
由2個軸伺服掃描鏡引起 |
|
探空密度水文數據 |
典型1,7 x 1,7 到 3,5 x 3,5 米 |
以優化調查要求 |
|
探空密度地形數據 |
典型的每平方米4個點到每平方米1個點 |
水文和地形數據的完美結合 |
|
海道測量精度 |
常規,國際航道測量組織命令為1或更好 |
依賴于調查參數 (優化調查要求) |
|
海底物體行列式. |
IHO Order 1或更好 |
見上文 |
|
深度范圍 |
標稱3 x secchi 深度 |
依賴于水濁度和海底反射.理論極限是70米 |
|
最小深度 |
0,3 米 |
水文和地形數據的完美結合 |
|
地形精度 |
橫向X/Y = ± 0,5米 |
|
|
系統總重量 |
< 190 Kg |
包括交流安裝套件 |
|
系統功耗. |
< 50 Amp on 28 V 電源 |
|
|
數據存儲 |
> 4 小時 |
堅固的移動硬盤 |
|
人機界面 |
實時的深度,高度,覆蓋面積介紹 |
在飛行中可優化系統設置以及任務規劃 |
|
后處理 |
工具箱與系統交付 |
|



















 ?
?