


3DM-GD慣性導航教學實驗系統簡介
(慣導/航姿/運動傳感)

V2.0
第一部分 3DM-GD系統介紹
1 系統用途
3DM-GD慣性導航教學實驗系統(慣導/航姿/運動傳感),該系統標配雙軸電動轉臺、轉臺控制器和一個MEMS器件的AHRS航姿參考系統,該傳感器由九軸慣性測量組合,包含三軸陀螺儀、三軸加速度計、三軸磁強計傳感器,能滿足導航、制導與控制專業的學生了解慣性導航及飛行控制原理,有助于學生理解、熟悉、掌握慣性導航/航向姿態/運動狀態采集的原理、技術及其應用,也可以滿足其它專業如飛行技術、航海技術、無人機技術、測繪技術等不同專業的慣性導航技術的科研和教學的使用。還可設計開發各類飛行器、車輛、船舶、機器人、工程機械、穿戴式等各類運動載體測量及控制的創新實驗。雖然我們完善了該系統的實驗教學功能,同時,該系統也是一個二次開發平臺,可以作為其他項目的數據采集驗證平臺。
2 功能特點
(1)較低的價格,可以讓眾多學生同時動手實驗,引領國內慣導/航姿/運動傳感教學和實驗進入普及化時代;
(2)國內首家配備低成本電動轉臺,可做定量實驗,更好的掌握慣導/航姿/運動傳感技術;
(3)提供全面的相關教學和實驗配套服務,減輕教師的負擔;
(4)集成度高,包含了各類運動相關傳感器;
(5)實驗覆蓋全面,從單一運動傳感器實驗到所有運動傳感器融合的綜合實驗;
(6)通過自身在國內慣導/航姿/運動傳感領域的領先技術,實現慣導/航姿/運動傳感實驗室方案的不斷升級,真正使高校教學/實驗/科研水平跟上技術發展的潮流;
(7)可為學校量身定做相關實驗系統;
(8)系統集成了多種模型,能夠完成各個學科,包括航天,航空,航海,陸地等載體的慣性導航實驗項目;
3 實驗設備

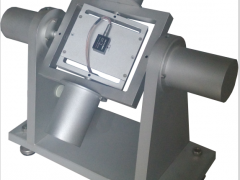
圖1-1 實驗設備示意圖
3.1 慣導/航姿模塊(3DM-E10A)
該模塊是一款微型的全姿態測量傳感裝置,它由三軸MEMS陀螺、三軸MEMS加速度計、三軸磁阻型磁強計等三種類型的傳感器構成。三軸陀螺用于測量載體三個方向的的絕對角速率,三軸加速度計用于測量載體三個方向的加速度,在系統工作中,主要作用是感知系統的水平方向的傾斜,并用于修正陀螺在俯仰和滾動方向的漂移,三軸磁阻型磁強計測量三維地磁強度,用于提供方向角的初始對準以及修正航向角漂移。可提供的輸出數據有:原始數據、四元數、姿態數據等。
3.2 雙軸電動轉臺(TT-3DM-2E-10)
機械臺體采用UO形鋁合金框架結構,由內環橫滾軸框架和外環俯仰軸框架組成相互垂直的轉動架構,采用直流電機驅動旋轉,實現三維空間任意位置和角度的姿態測量。具有位置、速率和搖擺三種測試功能。技術指標如下:
|
負載尺寸重量 |
50mm×50mm×50mm / 0.5 kg |
|
負載及夾具安裝空間 |
120 mm×120mm×120mm |
|
主軸與俯仰軸轉角范圍 |
連續無限 |
|
角位置綜合測量精度 |
±0.08º |
|
控制到位分辨率 |
±0.01º |
|
速率范圍 |
0.1º/s~300 º/s |
|
速率精度與平穩度 |
1% |
|
測角數據采集頻率 |
20Hz |
|
用戶導電滑環 |
12 環/每環2A |
|
臺體重量 |
15Kg~20 Kg |
|
測控電箱尺寸 |
300mmW×320mmW×88mmH |
|
串口波特率 |
115200 bps |
|
工作電源 |
220VAC/200 |
3.3 雙軸采集控制器(CC-3DM-2E-10)
采集控制器通過USB或串行接口連接計算機實現航姿模塊信號的采集與電動轉臺的測量控制。
|
測角數據采集頻率 |
20Hz |
|
外形尺寸 |
260mmW×230mmW×88mmH |
|
串口波特率 |
115200 bps |
|
工作電源 |
220VAC/200W |
第二部分 實驗平臺相關軟件介紹
1 轉臺控制軟件
轉臺控制軟件功能豐富,包括位置模式,速率模式,以及搖擺模式等等。能控制轉臺兩個軸分別進行運動。可以設定轉臺以某一角速率旋轉某一角度,也可以操縱轉臺持續以某一角速率旋轉,也可以設定轉臺以某一幅角搖擺運動。
同時,考慮到實驗室安裝,調試的準確性,我們還增加了“置水平位”和“歸位”操作,分別能夠使轉臺旋轉至初始0度位置,和垂直于水平面的位置。這一功能能夠使在學生完成實驗之后,統一調整轉臺至同一姿態,保證實驗室整齊整潔。

圖2-1 控制軟件截圖
2 航姿顯示實驗平臺
航姿顯示實驗平臺界面簡潔美觀,運行高效穩定,操作簡單實用。同時軟件還進行了大量的數據采集操作,以固定步長收集軟IMU輸出的數據,并將這些數據寫入文本文件和excel文件中,便于學生使用matlab和excel進行數據處理和姿態解算等等操作。
考慮到軟件的實用性,軟件中還可以自行設置步長以及自主選擇模型,共10種實物模型和1種簡單模型。包括:航空,航天,航海,陸地以及立方體模型。
在軟件操作方面,學生只需要點擊“寫入數據文件(txt和xls)”按鈕,即可將選定時間的數據保存在文件中,以備后續進行數據處理操作。這一功能不僅方便于學生進行實驗。在大作業方面,學生也只需要采集一組特定的數據,將數據保存下來后,編寫自己的程序進行不斷的改進,而不需要一直連接轉臺才能進行實驗。
第三部分 實驗方案介紹
轉臺上的IMU,能夠輸出以下數據:包括線加速度、角速率、磁阻、四元數和姿態角。基于這些數據的采集,我們目前設計了以下實驗。目前較為完善的實驗方案主要有:
|
實驗編號 |
實驗名稱 |
|
1 |
實驗系統安裝和軟件設置實驗 |
|
2 |
AHRS及微慣性傳感器認知實驗 |
|
3 |
加速度計測量與結果驗證實驗 |
|
4 |
加速度計標度因數和零偏的測量與計算實驗 |
|
5 |
陀螺靜態測量與零偏計算實驗 |
|
6 |
陀螺動態測量與標度因數估計實驗 |
|
7 |
采用磁傳感器的電子羅盤設計實驗 |
|
8 |
四元數法姿態解算程序設計實驗(大作業實驗) |
第四部分 系統配置清單
|
序號 |
名稱 |
型號 |
單位 |
數量 |
|
主要器件 |
||||
|
1 |
慣性導航教學實驗系統 |
3DM-GD |
套 |
|
|
配置 |
||||
|
1 |
慣導航姿模塊 |
3DM-E10A |
個 |
1 |
|
2 |
動態傾角傳感器 |
D10A |
個 |
1 |
|
3 |
雙軸電動轉臺 |
TT-3DM-2E-10 |
個 |
1 |
|
4 |
雙軸采集控制器 |
CC-3DM-2E-10 |
個 |
1 |
|
5 |
軟件光盤 |
|
張 |
1 |
|
6 |
連接線及電源線 |
|
套 |
4 |
|
7 |
教學配套實驗軟件 |
定制 |
套 |
8 |
|
|
整套合計 |
|
|
|
*可定制配套實驗
可根據經費和實驗室的大小來配置實驗系統套數,效果比較好的配置是分組操作(3人一套設備),使每個學生都有條件分別獨自操作完成實驗。
實驗室也可以分期建設,逐步配置齊全。
第五部分 附錄
1.單套慣性導航教學實驗設備圖片

2.某高校配置的8臺雙軸電動轉臺慣導實驗室圖片













 ?
?